RoboPad
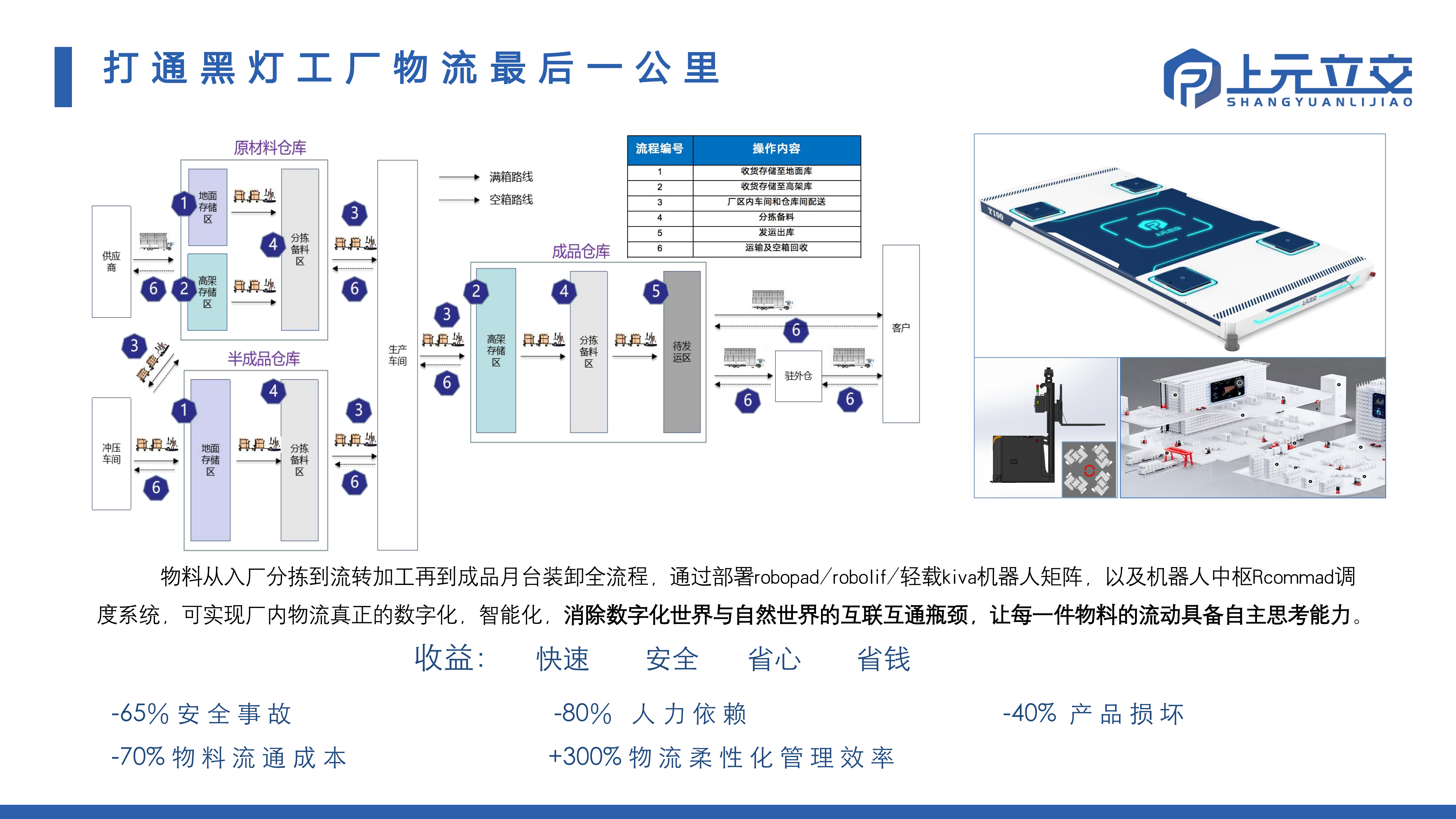
引 领 机 器 人 时 代 的 厂 内 物 流 变 革 !



引 领 机 器 人 时 代 的 厂 内 物 流 变 革 !



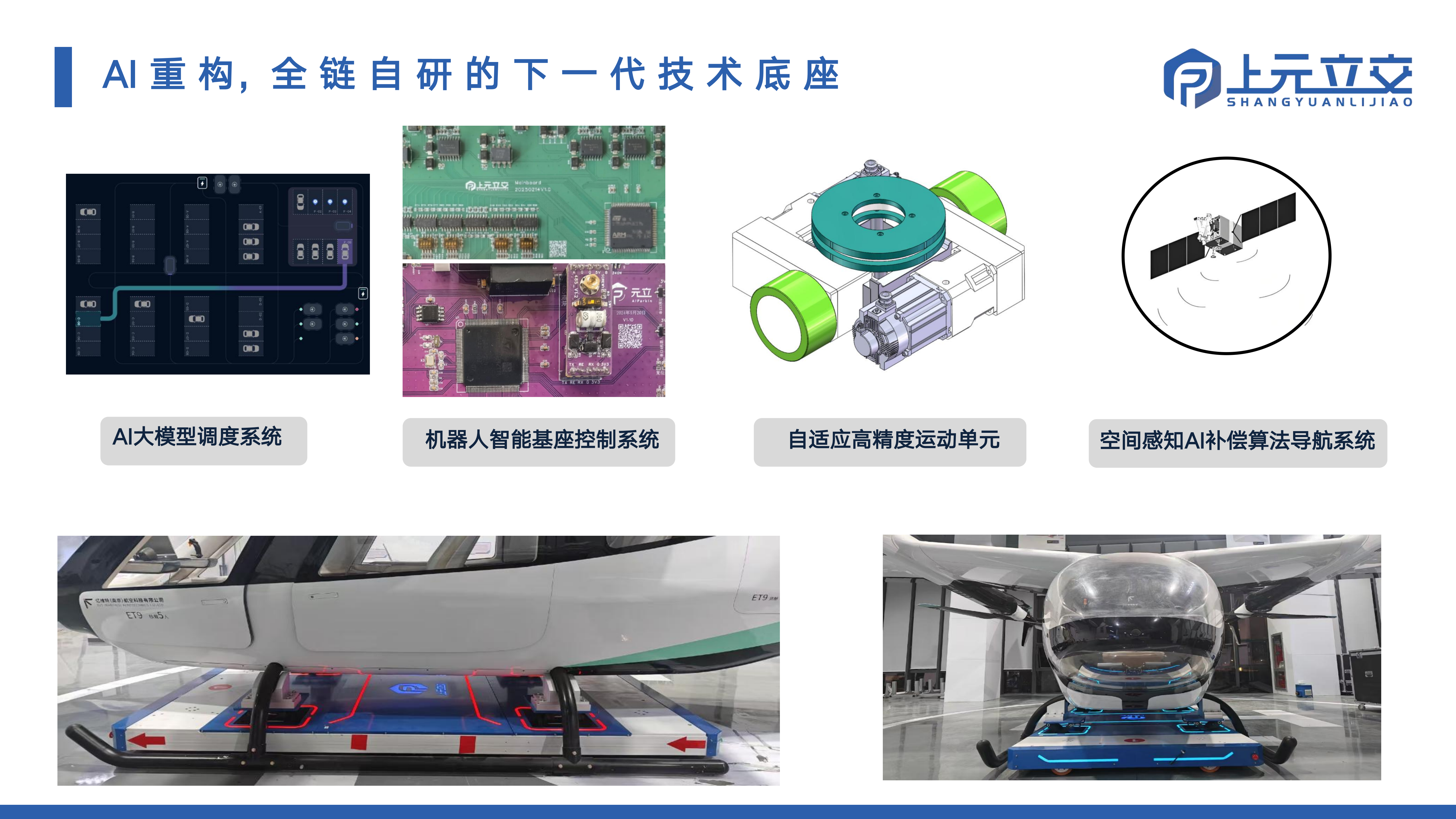
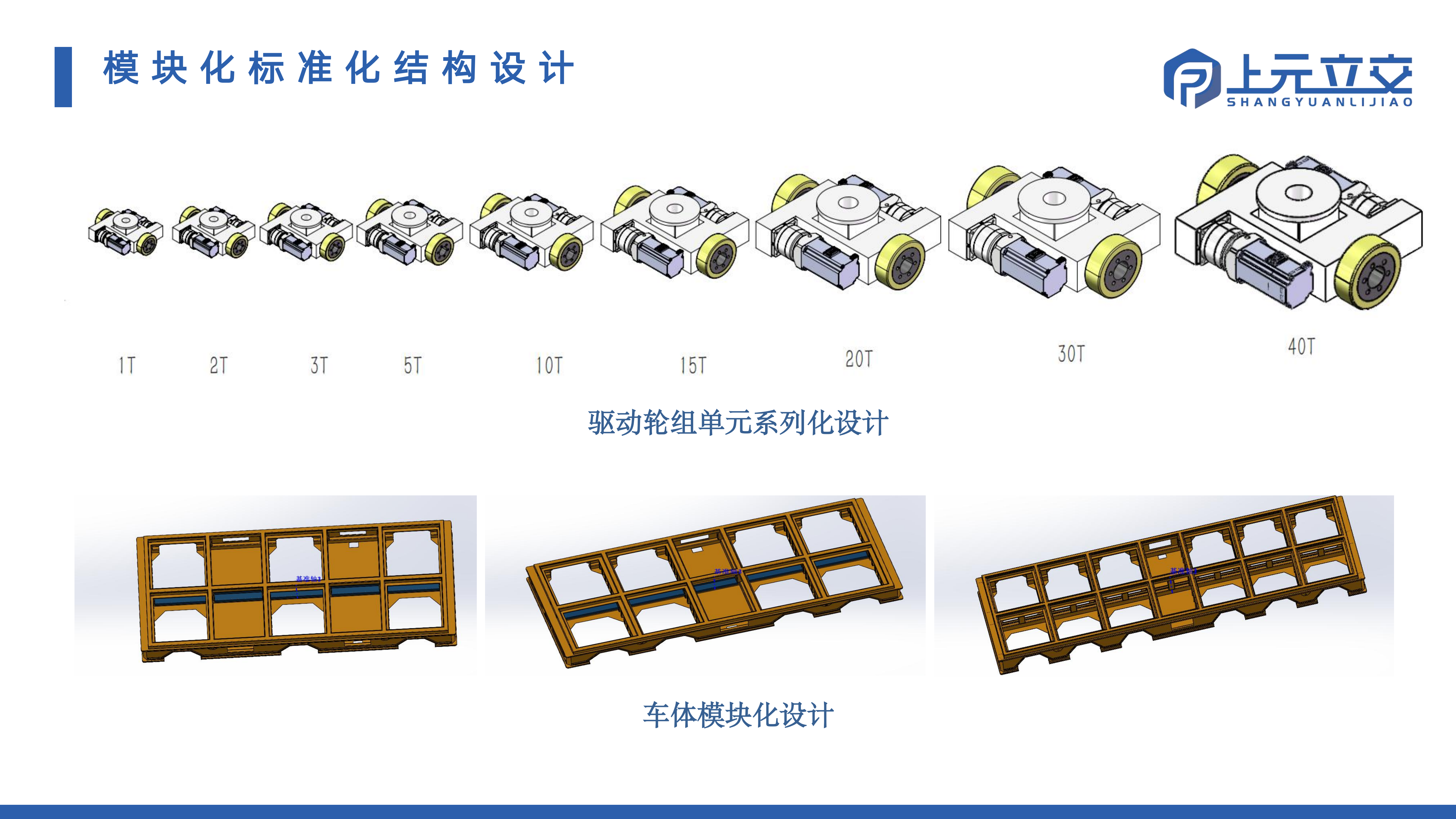
航天级精密结构设计PID运动单元模组
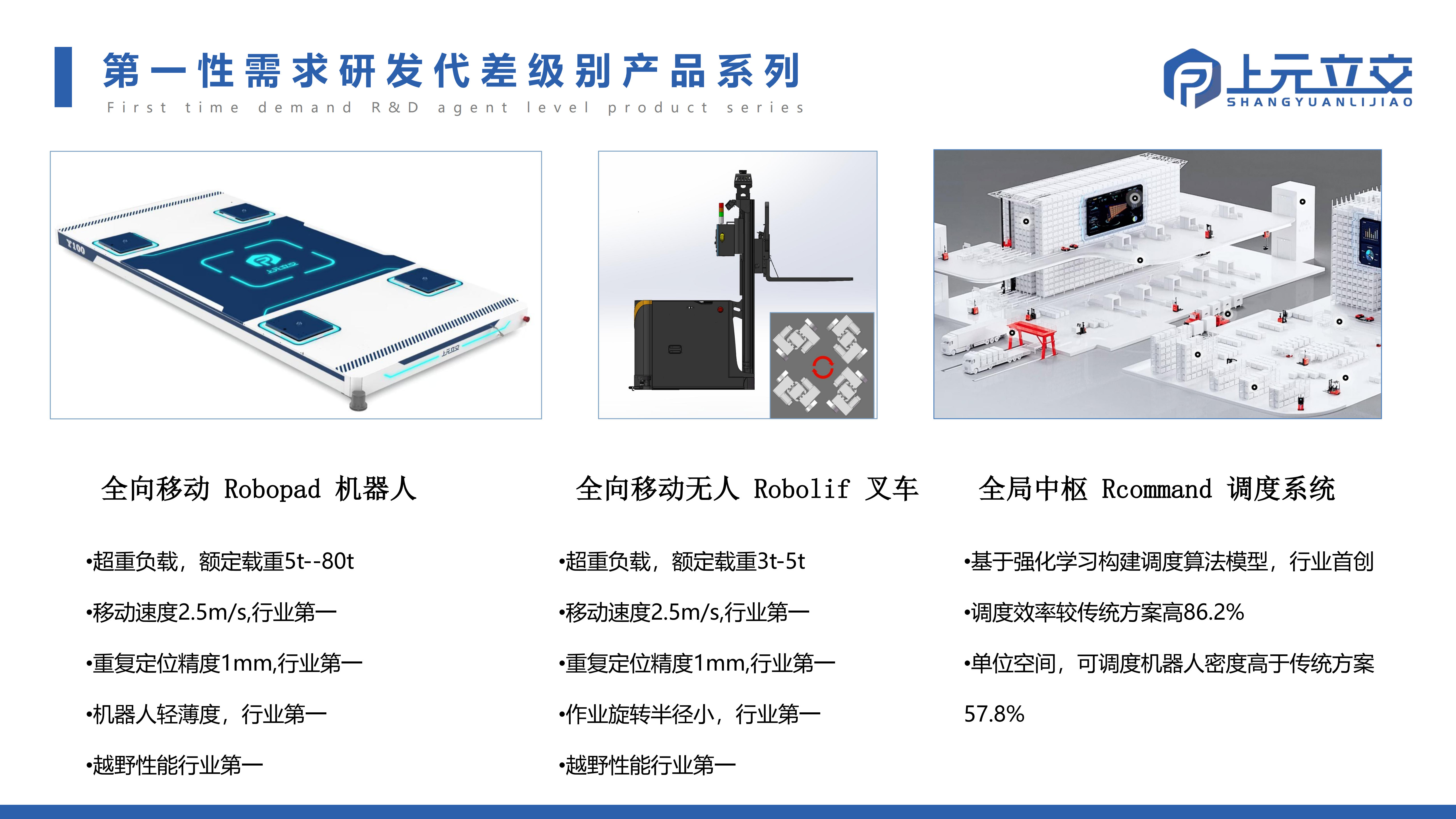
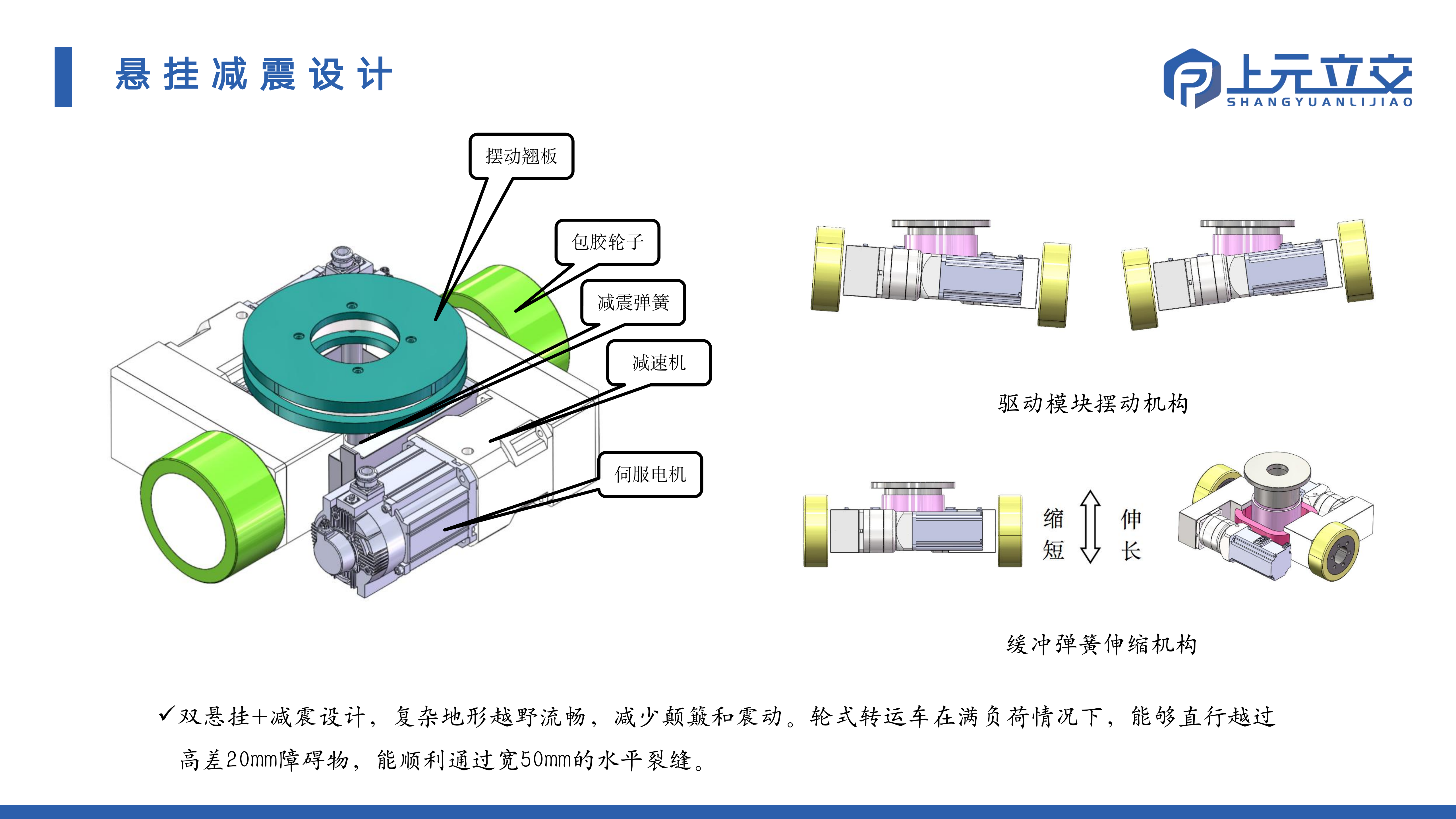
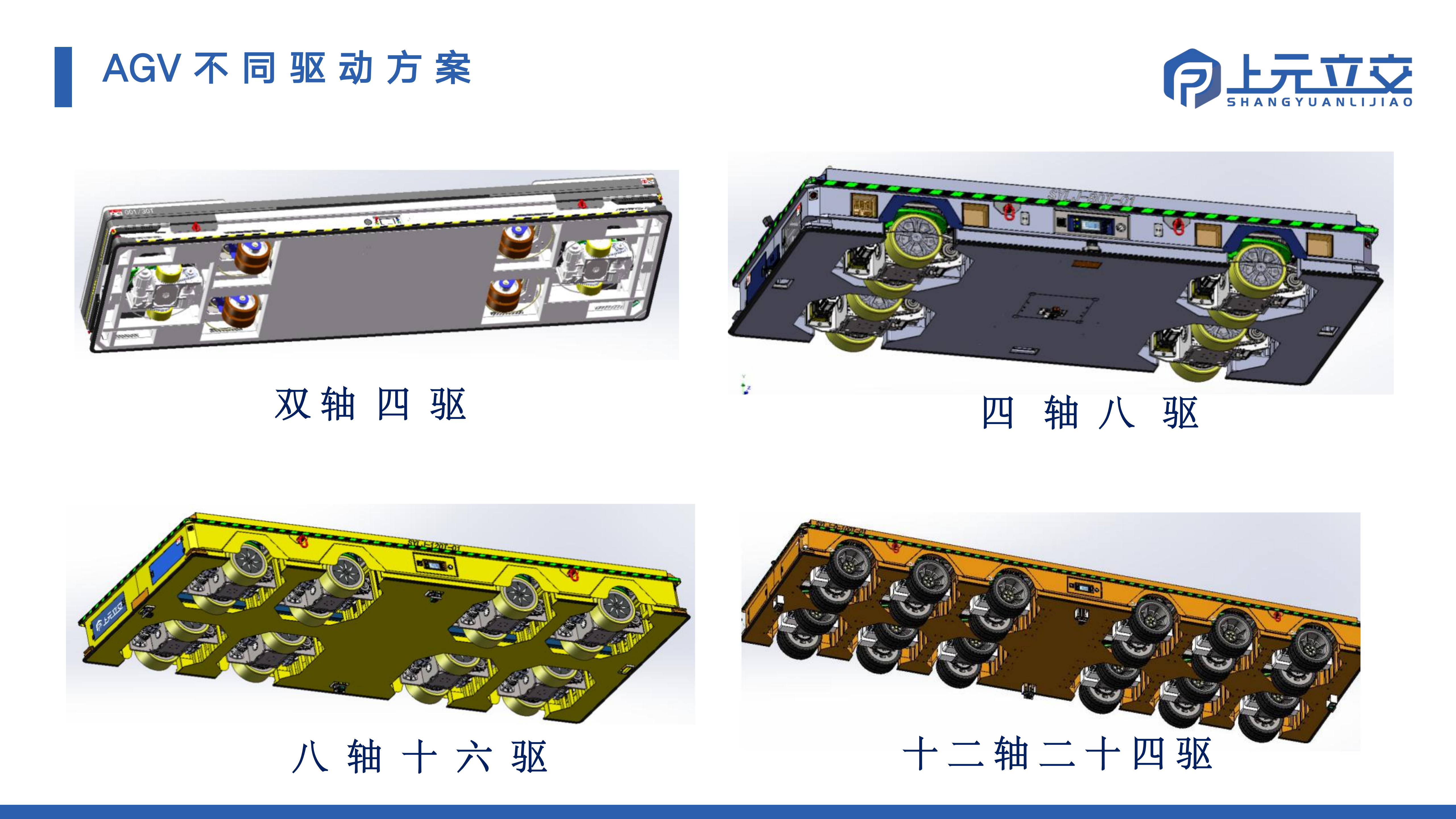
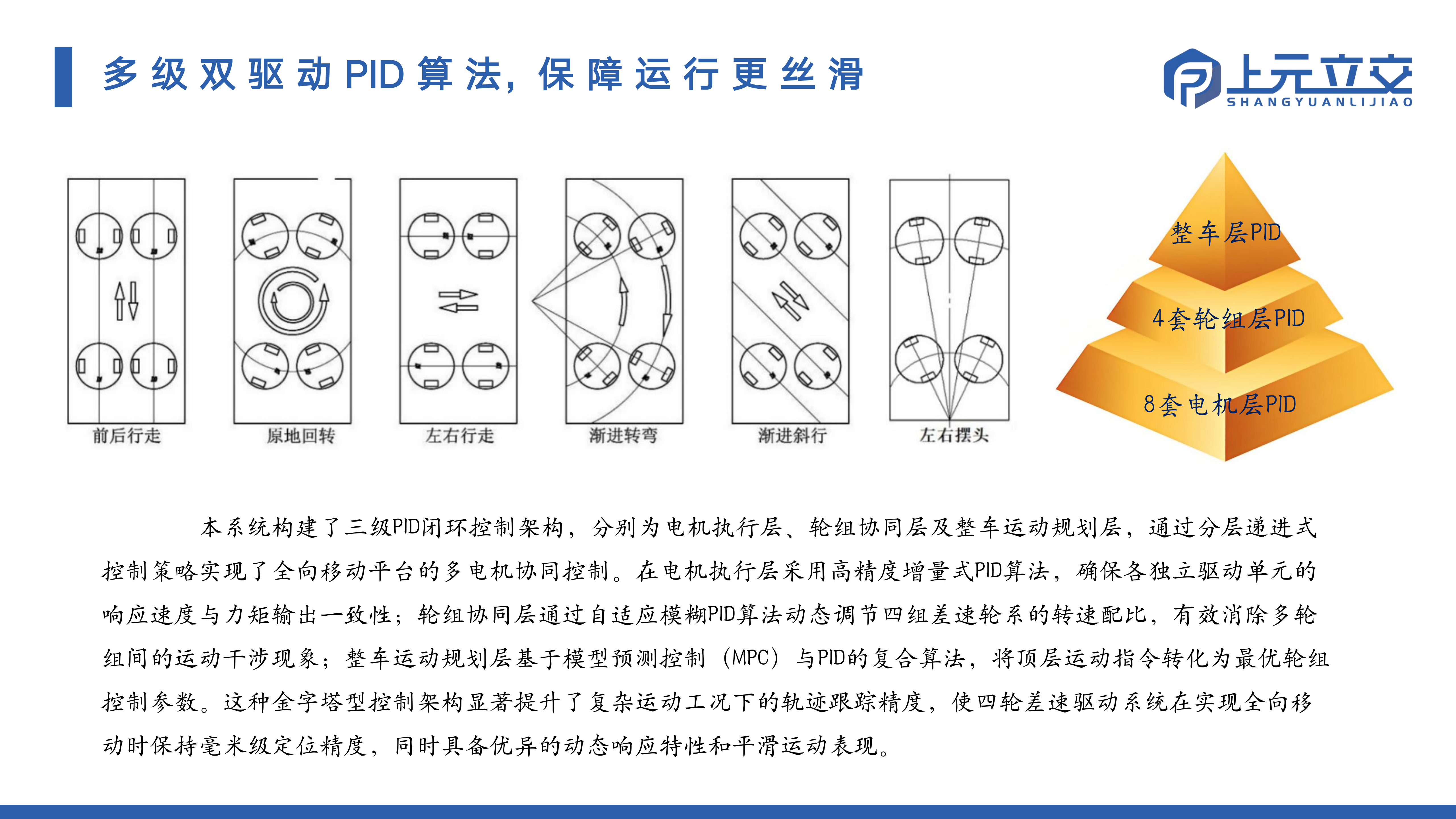
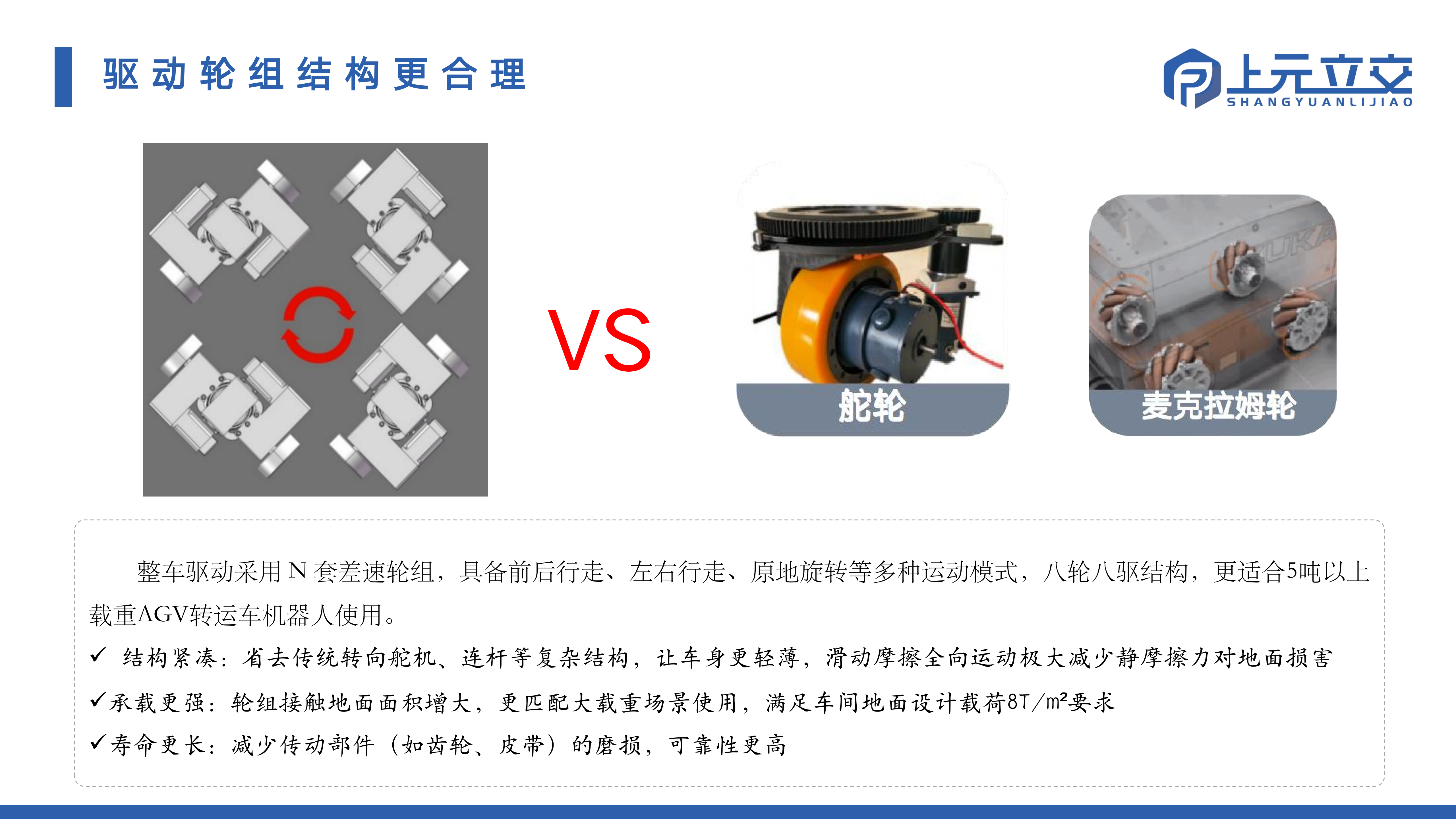
超高精度双驱动PID控制算法 全向移动 ,滑动摩擦,结构稳定,兼容性良好。差速驱动轮组驱动1-10套轮组自由组合,强驱动力,轻薄设计,运行灵活机动。双悬挂 +减震设计,复杂地形越野流畅,减少颠簸和震动。
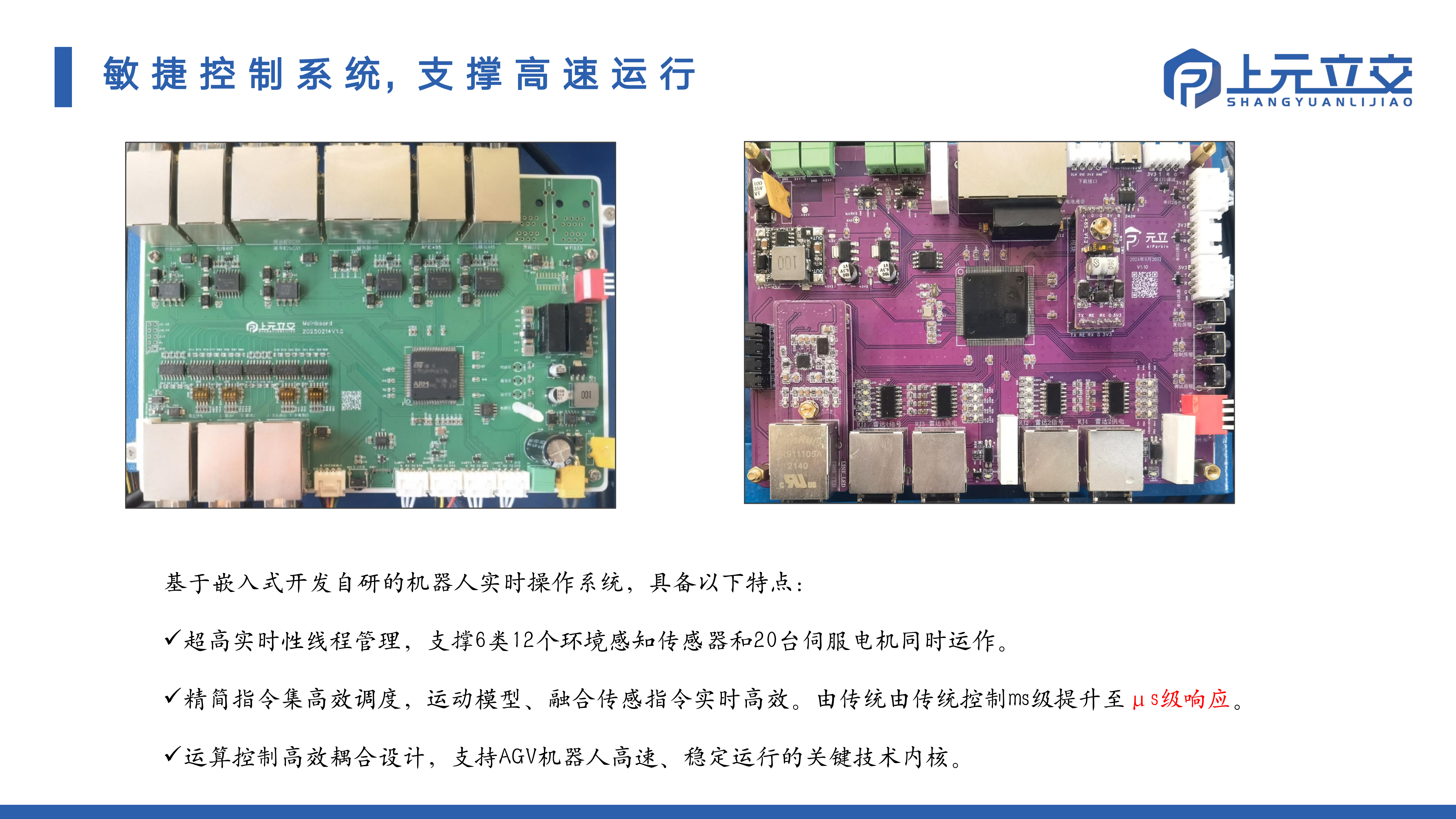
高鲁棒信创机器人实时操作系统RTOS
超高实时性线程管理,支撑6类12个环境感知传感器和20台伺服电机同时运作。精简指令集高效调度,运动模型、融合传感指令实时高效。运算控制高效耦合设计,支持机器人提速到2.5m/s关键技术内核80%。
基于北斗算法的室内外全天候融合导航算法AFNA
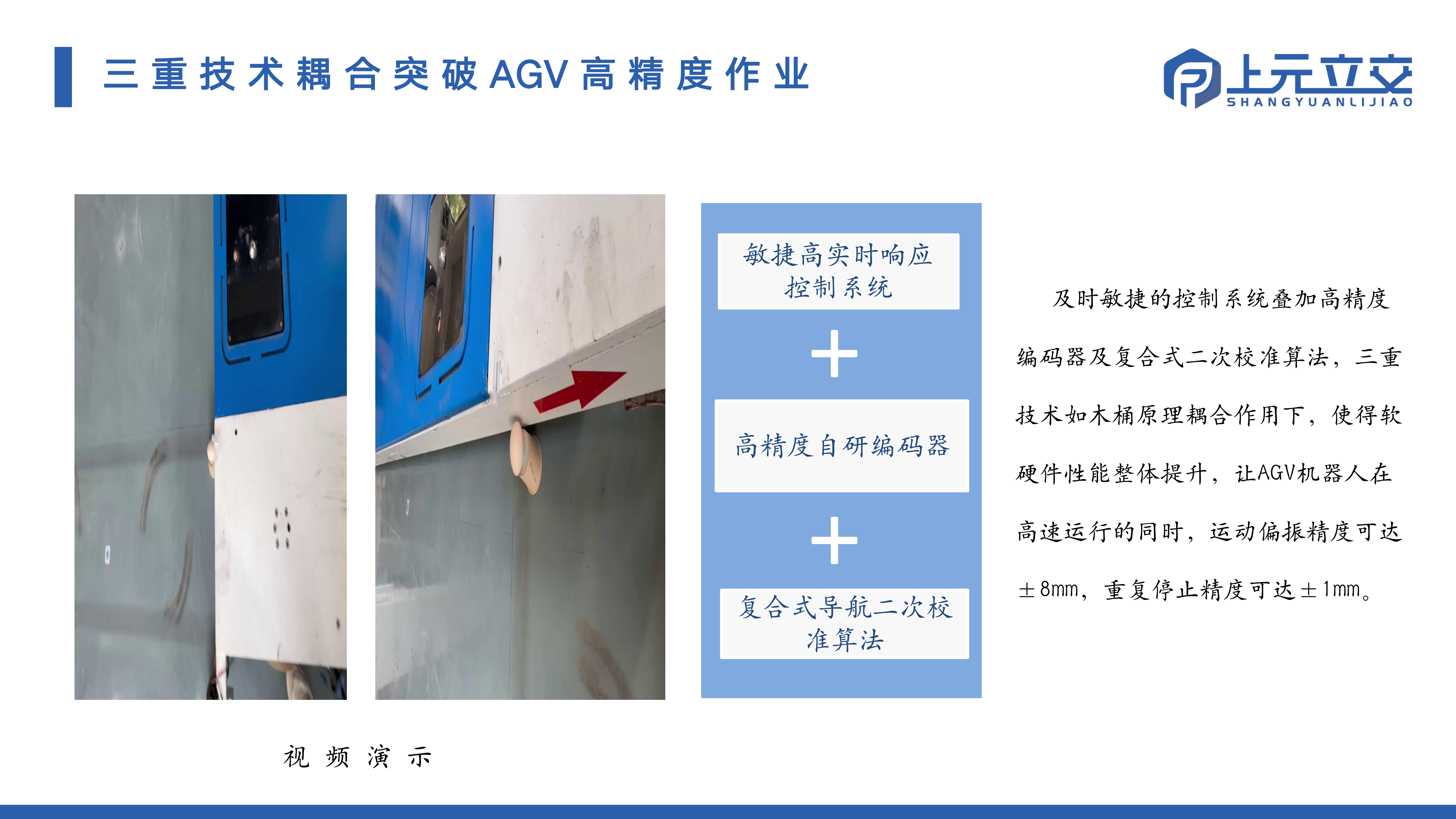
原创融合导航算法,融合激光/视觉/惯导/磁导四类传感优势,自主可控,根据环境组合。全天候导航能力,在雨雪、粉尘、昏暗环境及地面杂乱、渗水、潮湿等情况下均能稳定流畅作业。复合式二次校准算法,实现运动偏振8mm,静止精度1mm。
基于空分时分+强化学习高密度调度算法STRL
全局最优解同时规划多机器人路径,杜绝其他A*算法等局优算法全局神经网络状态机梯次输入输出,强化学习,自主进化。交通管制&冲突规避算法 ,机器人路线冲突自动规避。多层级仓位动态调度算法 ,较大幅度提升单位空间调度效率。







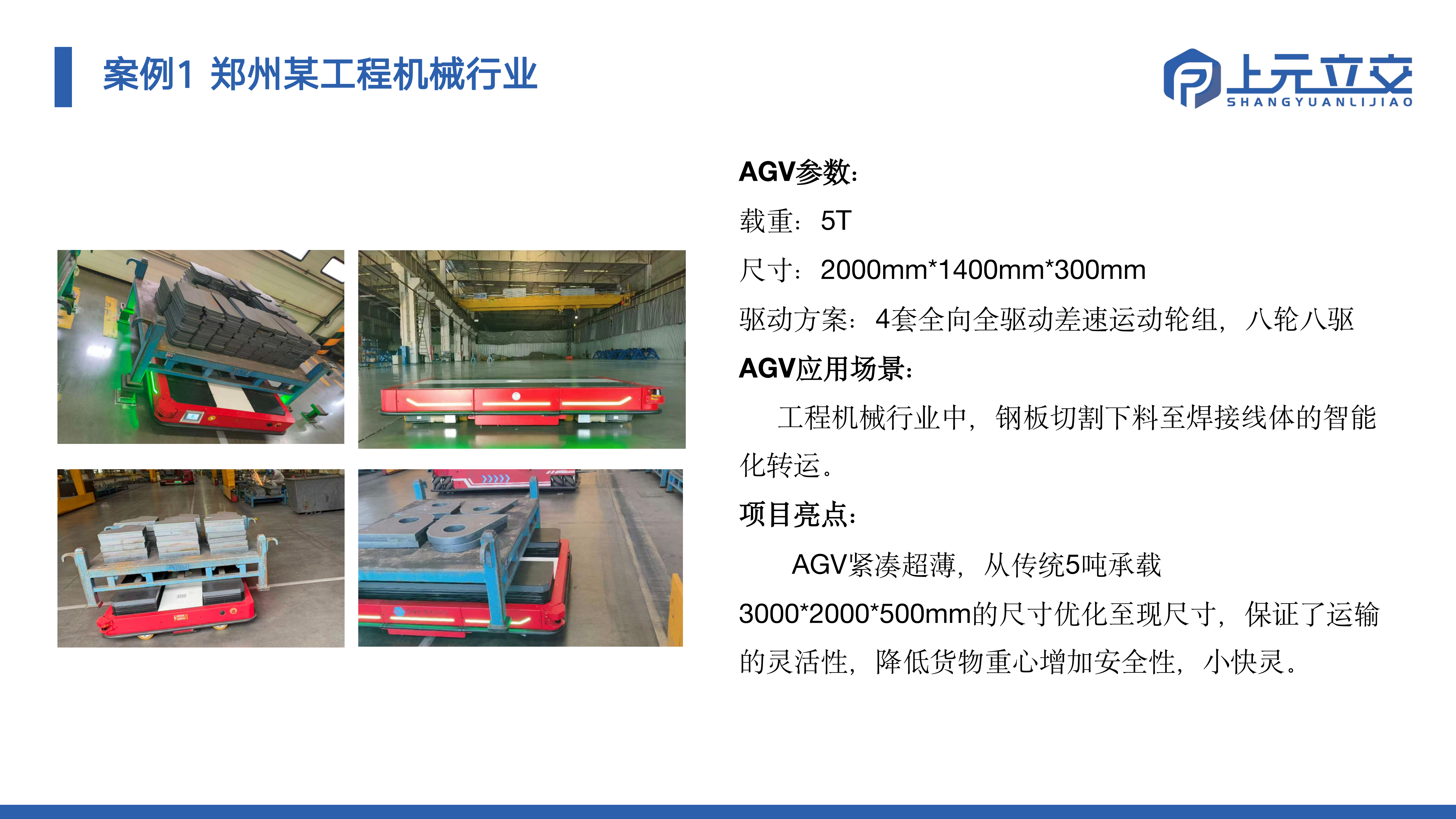
郑州某工程机械行业

郑州某工程机械行业
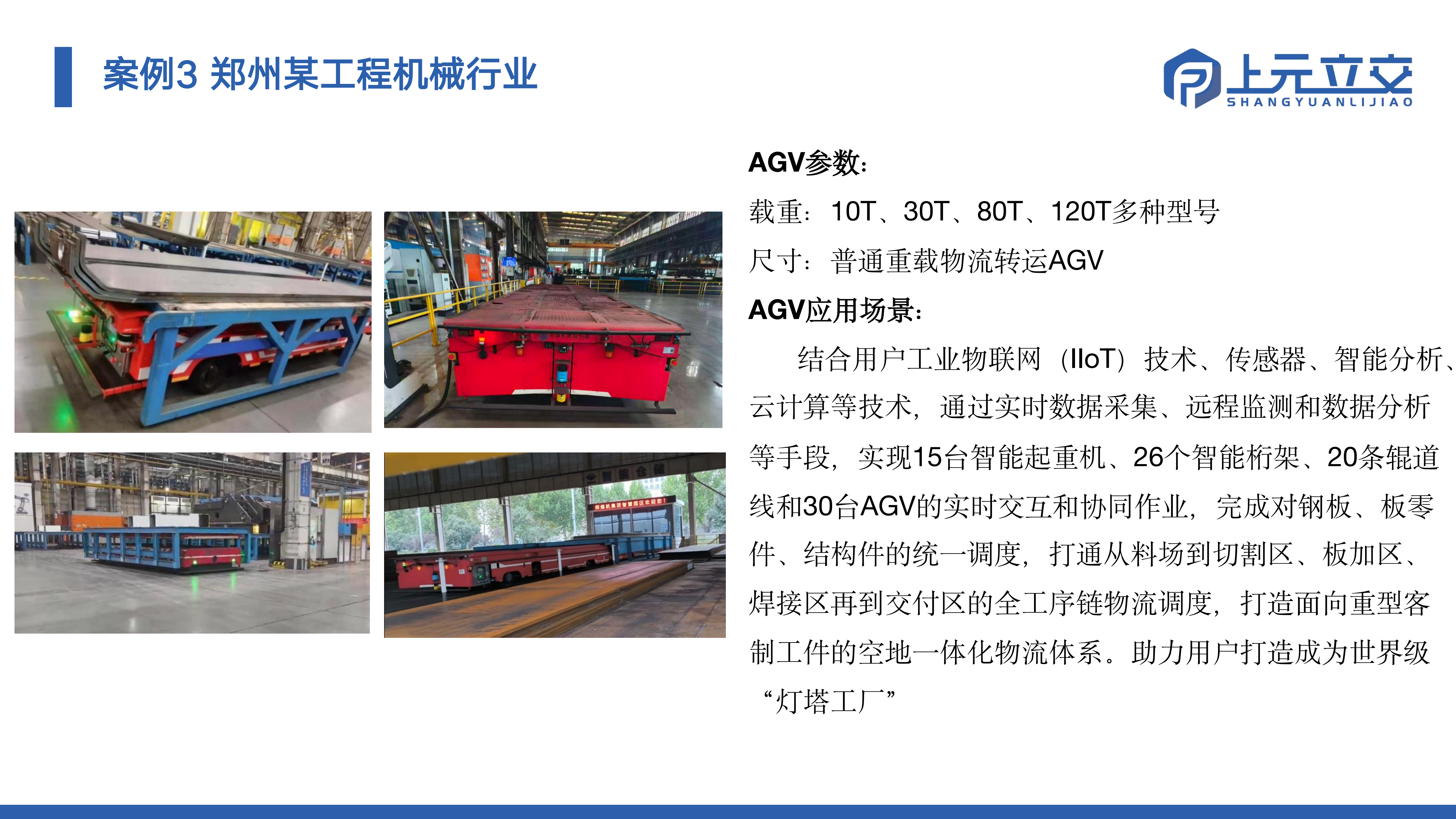
郑州某工程机械行业
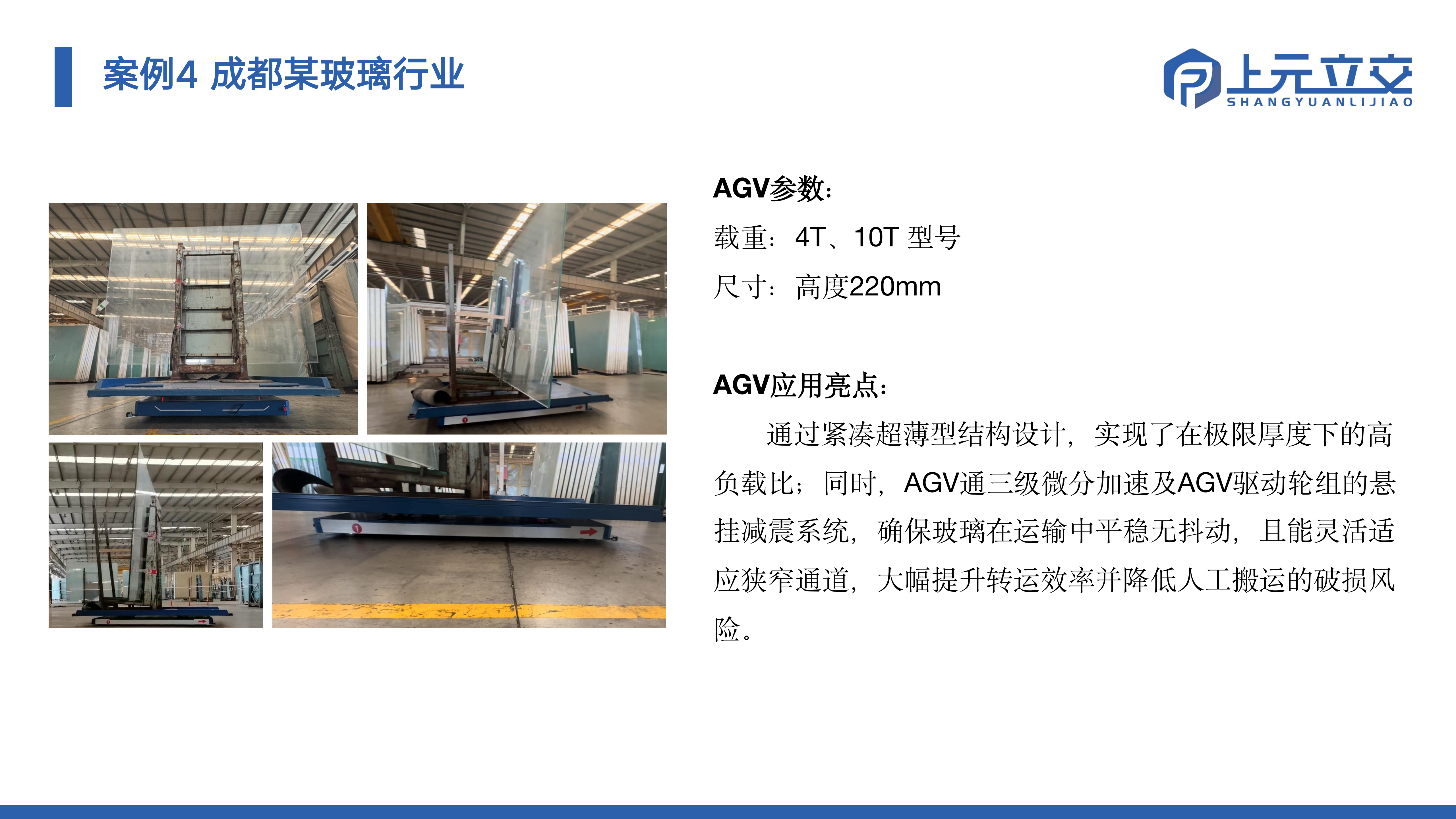
成都某玻璃行业
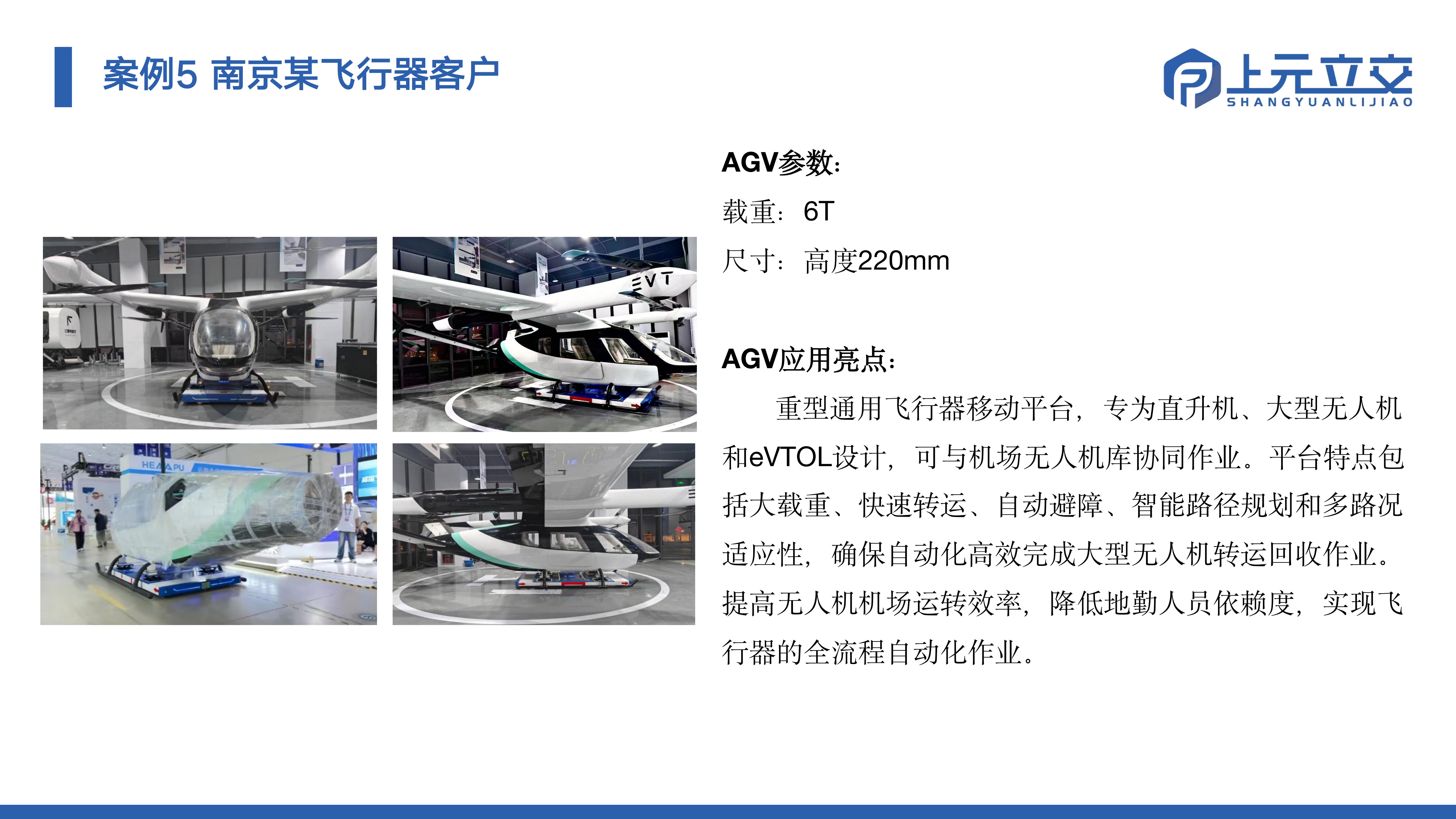
南京某飞行器客户
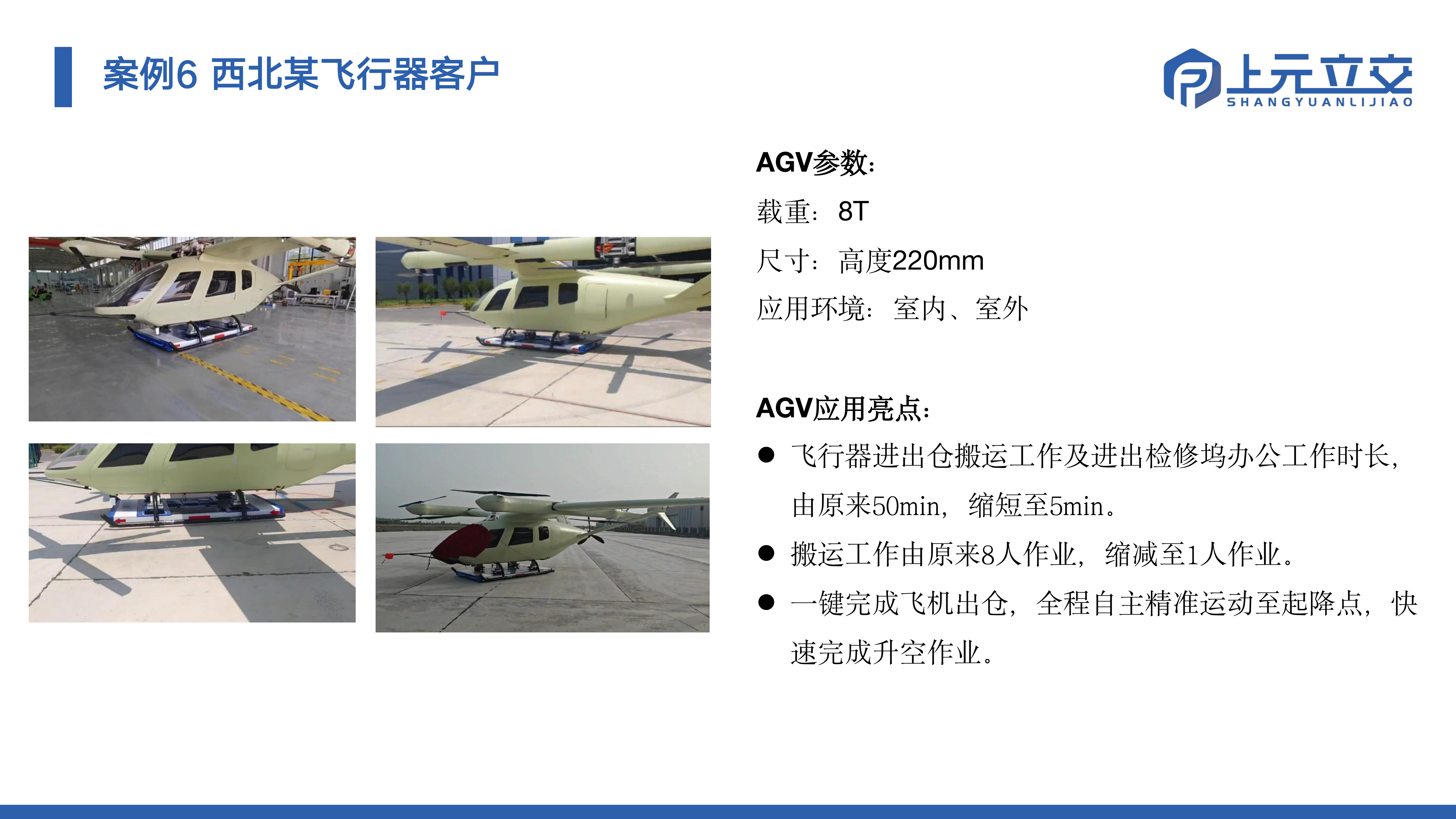
西北某飞行器客户

西南某医院

西南某城市交通

上海某停车
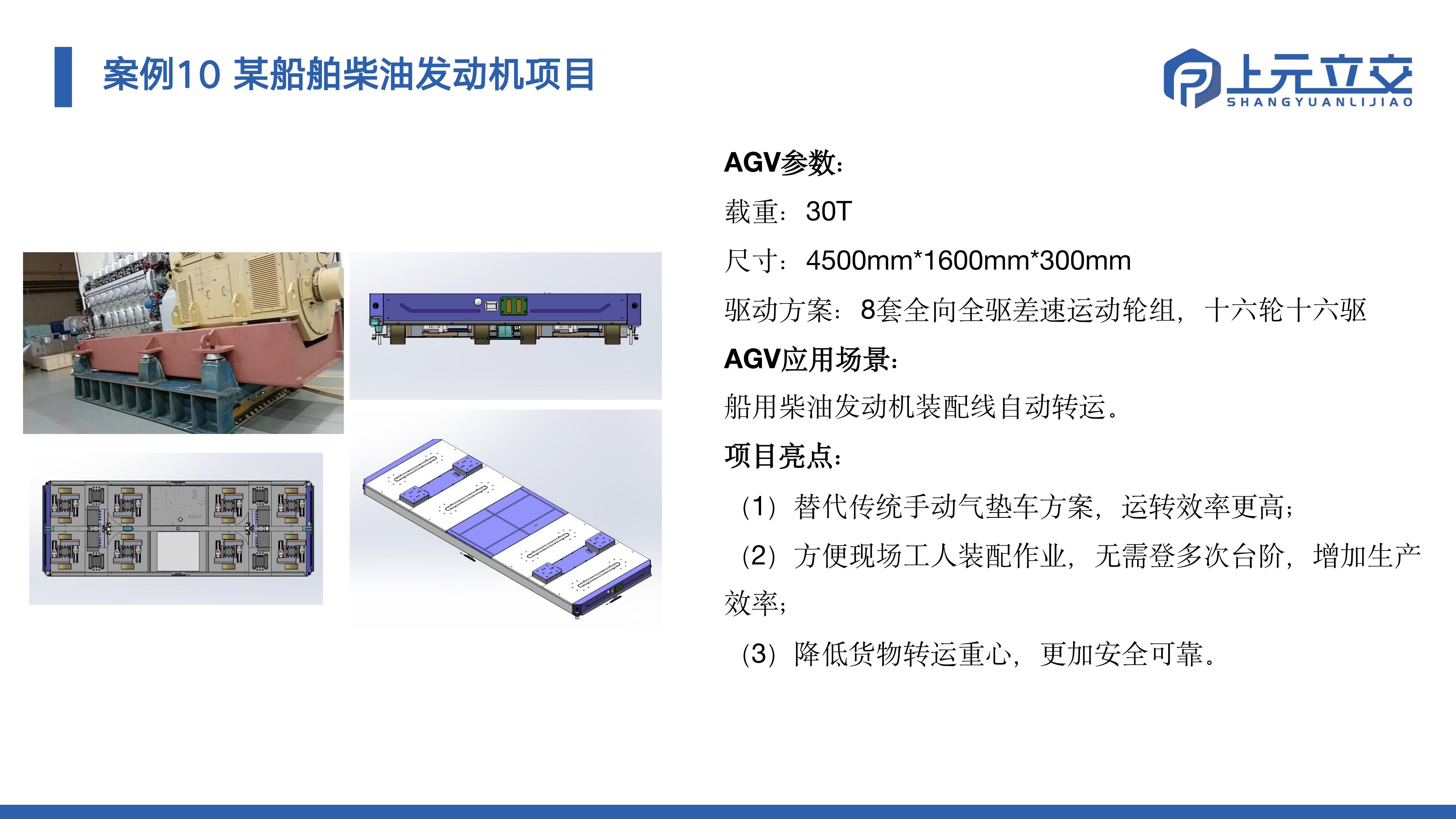
某船舶柴油发动机项目

中石化广东某项目

TESLA/CATL 电池PACK转运定制AGV
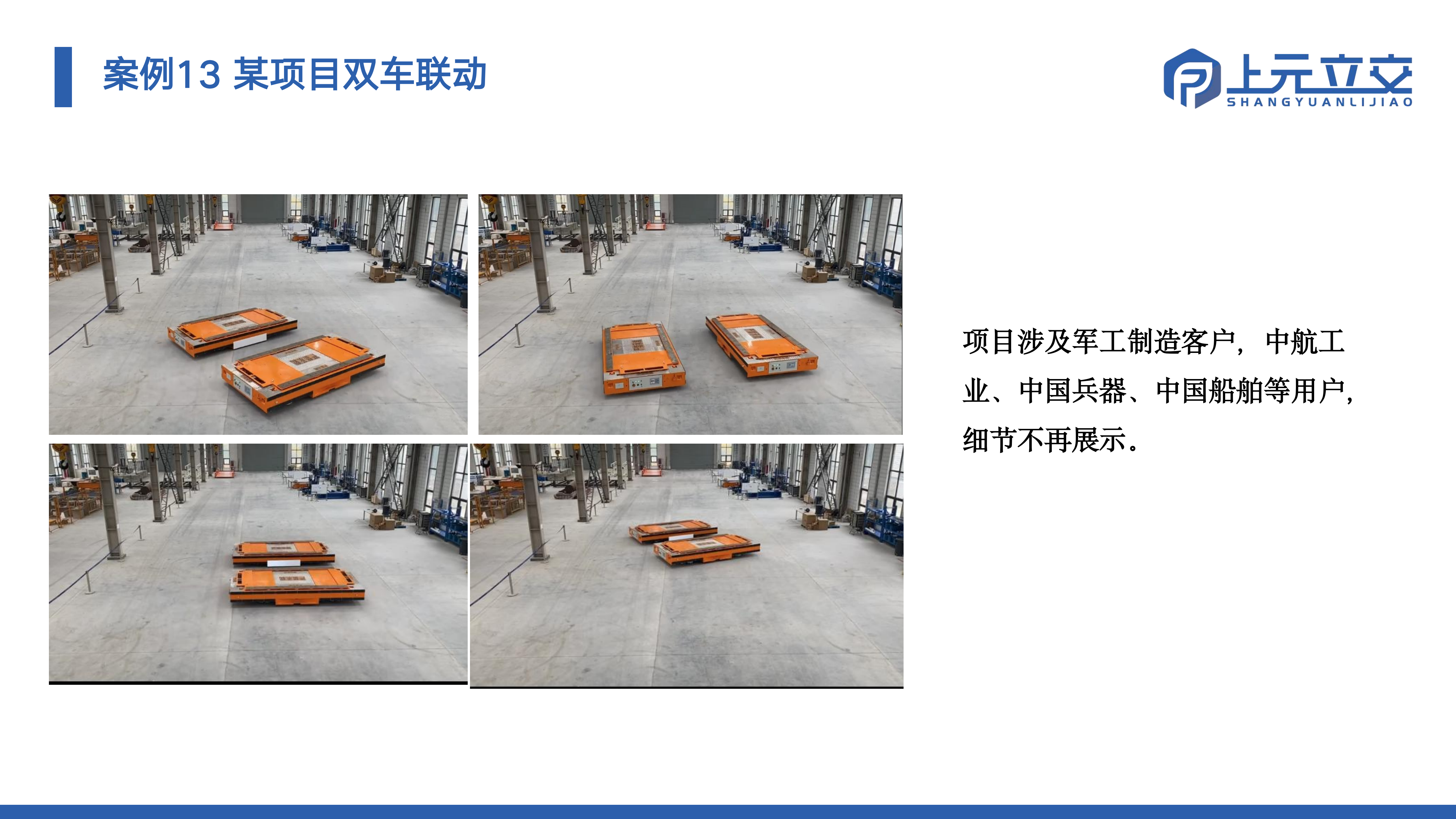
某项目双车联动
上元立交(上海)科技有限公司基于上海交通大学机器人所、智能网联电动汽车创新中心、并行计算研究所、北斗导航研 究院、网络空间安全学院等在人工智能、环境感知和机器人等方向的前沿科研成果支撑,专注于移动机器人核心技术研发公关。 聚焦移动机器人行业深水区,技术协同各类市场主体完成大承重(≥5t)、低底盘(≤25cm)、高速度(≥2.5m/s)、高精度(≤1mm) 移动机器人车体的开发和项目交付,同时辅助企业攻坚各类复杂场景机器人调度系统开发,支持不限量多模态机器人协同工作。 一站式技术服务,让客户全要素掌握移动机器人技术内核。 上元立交的核心价值是,在第一性原理的逻辑下,把AGV产品的整体技术实现了技术穿透,叠加AI技术的不断优化,让 AGV更高效,更便宜,更容易,是面向下一代的AGV产品。。